")
Obsah:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 12:00.
- Naposledy zmenené 2025-01-23 15:06.

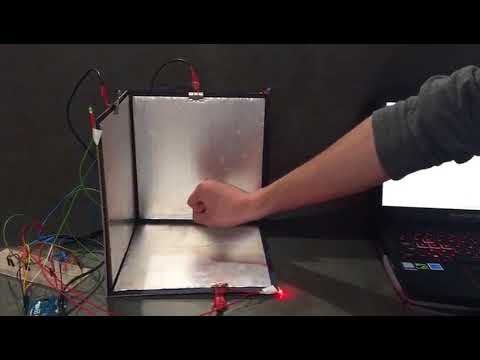

V tomto návode je vysvetlené, ako je možné sledovať pohyb ruky v 3D priestore pomocou princípu kapacitného snímania. Zmenou vzdialenosti medzi nabitou hliníkovou fóliou a rukou sa kapacita kondenzátora zmení. Túto metódu je možné použiť ako low-end alternatívu pre inerciálne a optické systémy na sledovanie pohybu v 3D priestore. V tomto prototype sme pridali LED diódy, ktoré budú svietiť, keď sa predmet priblíži príliš blízko listu hliníkovej fólie.
Krok 1: Potrebné nástroje a materiály
- 3x odpor 270k Ohm
- 3x 10k Ohm odpor
- 3x klip aligátora
- 1x červená LED
- 1x modrá LED dióda
- 1x zelená LED dióda
- 3x odpor 220 ohmov
- Spájka
- Zmršťovacia
- tienený kábel
- Arduino Uno
- Alobal
- Kartón
- Páska
- nastriekajte lepidlo
- Breadboard
- Pripojovacie vodiče (rôzne dlhé)
Krok 2: Konštrukcia rámu




Vystrihnite tri štvorcové kusy lepenky (250 x 250 mm) a tri štvorcové kusy alobalu (230 x 230 mm). Na jednu stranu hliníkovej fólie naneste sprejové lepidlo a každé naneste na kúsky lepenky. V tomto prototype budú plechy z hliníkovej fólie fungovať ako naše kapacitné snímače. Zaistite preto dostatok priestoru medzi hliníkovou fóliou a okrajom lepenky, aby po zostavení rámu nedošlo k kontaktu medzi rôznymi listami fólie. Akonáhle je fólia nanesená na lepenku, je čas zostaviť tri kusy lepenky pomocou pásky na dokončenie rámu. Opäť sa uistite, že medzi rôznymi listami hliníkovej fólie nie je žiadny kontakt.
Krok 3: Zapojenie štítových drôtov k doske a Arduinu



Na pripojenie fólií k obvodu je dôležité použiť tienený kábel. Použitie bežných káblov spôsobí anténny efekt a bude rušiť hodnoty vašich senzorov. Uistite sa, že máte 3 tienené káble, ktoré sú dlhé asi 50 cm. Vezmite jeden kábel, odizolujte drôt, odrežte tienenie a použite iba vnútorný vodič na jeho spájkovanie spájkovaním drôtu s aligátorovou sponou. Na zakrytie spájkovacieho spoja určite použite zmršťovanie teplom. Klipy aligátora pripnite na hliníkovú fóliu.
Pripojte všetky vodiče štítu k kladnému radu nepájivého poľa. Potom pripojte tento kladný riadok k 5V pripojeniu na vašom Arduino. Teraz vezmite hlavný vodič z tieneného kábla a paralelne zapojte odpor 10 kOhm a 220 kOhm. Pripojte to k výstupnému portu vášho Arduina (použili sme 8, 9 a 10).
Tento krok zopakujte ešte dvakrát pre ostatné lietadlá prototypu.
Krok 4: Zapojenie LED diód




Konce LED diód spájkujte na dlhý drôt, aby sa z arduino dosky dostal do rohov príslušných dosiek.
Ako výstupné kolíky pre naše LED diódy sme použili kolíky 2, 3 a 4. Tento výstup je pripojený k nepájivej doske a je pripojený k kladnému ramenu LED. Negatívna časť LED diódy je potom pripojená k odporu 330 Ohm. Druhý koniec rezistora je spojený so zemou nepájivej dosky, ktorá je spojená so zemou Arduina. Opakujte to pre všetky 3 LED diódy. V našom prototype je modrá LED dióda pripojená k rovine Y, červená LED k rovine Z a zelená LED k rovine X. Prilepte LED diódy k zodpovedajúcim rovinám, aby ste získali priamu spätnú väzbu pri použití prototypu.
Ak nepoužívate breadboard a chcete pripojiť štítový kábel priamo k Arduinu, na priloženom obrázku je pekný prehľad spájkovacích spojení. Vaše konečné pripojenia by mali vyzerať ako prehľadný obrázok.
Krok 5: Kódovanie
V prílohe sme umiestnili kód, ktorý sme použili pre tento experiment. Aby ste získali ďalšie informácie, po každom hlavnom príkaze je vložený komentár s vysvetlením, čo sa deje v kóde. Otvorte kód v softvéri Arduino v počítači a nahrajte ho do zariadenia Arduino. Ak používate prenosný počítač, uistite sa, že sa nabíja; inak váš prototyp nebude fungovať.
Krok 6: Použitie prototypu
Tento spôsob 3D sledovania pohybu je veľmi citlivý na okolité premenné. Zaistite preto kalibráciu hodnôt v kóde podľa svojej vlastnej situácie. Na získanie správnych hodnôt môžete jednoducho použiť sériový monitor. Tip: Kalibráciu môžete vytvoriť sami, pričom pri spustení kódu sú potrebné priemerné hodnoty + 10 %. Na videu je ukázané, ako by mal prototyp správne fungovať.
Odporúča:
Sledovanie a sledovanie malých obchodov: 9 krokov (s obrázkami)
")
Track & trace pre malé obchody: Jedná sa o systém, ktorý je vytvorený pre malé obchody a ktorý sa má montovať na e-bicykle alebo e-skútre pri dodávkach na krátku vzdialenosť, napríklad v pekárni, ktorá chce dodávať pečivo. Čo znamená Track and Trace? Track and Trace je systém, ktorý používa približne
QeMotion - sledovanie pohybu pre každú náhlavnú súpravu!: 5 krokov (s obrázkami)
")
QeMotion - sledovanie pohybu pre každú náhlavnú súpravu!: Prehľad: Toto zariadenie vám umožňuje využiť pohyb hlavy na spustenie udalostí v podstate v akejkoľvek videohre. Funguje to tak, že sleduje pohyb vašej hlavy (alebo headsetu) a pri určitých pohyboch spúšťa stlačenie klávesnice. Takže váš počítač
Použitie výstupu ultrazvukového senzora vzdialenosti a výstupu sériového monitora .: 6 krokov

Použitie ultrazvukového senzora vzdialenosti a výstupu sériového monitora: Hej, chlapci! Chcete sa naučiť používať výstup zo sériového monitora. Tak tu máte perfektný návod, ako na to! V tomto návode vás prevediem jednoduchými krokmi potrebnými na zistenie vzdialenosti pomocou ultrazvukového senzora a nahlásim
Očkovať alebo nie? projekt na sledovanie imunity stáda prostredníctvom simulácie chorôb: 15 krokov

Očkovať alebo nie? projekt na sledovanie imunity stáda prostredníctvom simulácie chorôb: Prehľad projektu: Náš projekt skúma imunitu stáda a dúfa, že povzbudí ľudí k očkovaniu, aby sa znížila miera infekcií v našich komunitách. Náš program simuluje, ako sa choroba nakazí populáciou rôznym percentom očkovaných
Domáce sledovanie prostredníctvom Twitteru a YouTube: 6 krokov

Domáce sledovanie prostredníctvom Twitteru a YouTube: S najnovšou verziou Yoics pre Windows môžete ľubovoľnú webovú kameru jednoducho prispôsobiť svojmu osobnému systému sledovania, kde sa videá automaticky nahrávajú na server YouTube & odošle sa upozornenie na Twitter